- A+
所属分类:打印机驱动安装

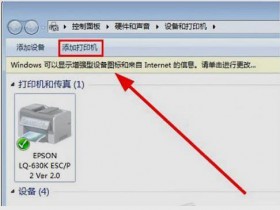
安装便携式打印机驱动,基于软体机器人的工作原理,提出了一种用于水果无损抓取的软体采摘机械手,利用3D打印技术制作的模具,制备出驱动手指,并通过法兰盘将4个驱动手指装配成软体采摘机械手。为了分析驱动手指的结构参数对弯曲特性的影响,采用ABAQUS有限元分析对各个结构参数进行分析,优化了驱动手指的结构参数。搭建试验平台,在0~60kPa驱动气压作用下,通过弯曲特性试验验证了有限元仿真的准确性,通过末端输出力试验得到弯曲角度与末端输出力的关系,最后对包络抓取和指尖抓取两种抓取方式进行对比分析,得出软体采摘机械手的最大输出力大约为5.8N。
- 在线微信客服
- 加18915735256 在线装驱动
-

- 我的微信公众号
- 我的微信公众号扫一扫
-